Правильная мощность двигателя и преобразователя частоты
Производители электродвигателей и частотных преобразователей разработали различные методы для быстрого выбора мощности двигателей и частотных преобразователей под конкретную нагрузку оборудования. Такая же базовая процедура используется большинством инженерных приложений. Однако для инженеров важно четко понимать процедуру выбора.

Одна из лучших процедур использует простую нумерацию, основанную на кривых ограничения нагрузки, чтобы сделать основной выбор мощности двигателя. Эта процедура описана ниже. Затем проверяются другие факторы, чтобы обеспечить оптимальную комбинацию двигателя и преобразователя.
Рекомендуются 4 следующих принципа подбора:
Принцип выбора 1:
Во-первых, базовая скорость должно выбираться таким образом, чтобы двигатель работал как можно с большей скоростью, немного превышающей базовую скорость 50 Гц.
Это желательно, потому что:
- Тепловая мощность двигателя улучшается при f ≥ 50 Гц из-за более эффективного охлаждения на более высоких скоростях.
- Потери коммутации преобразователя минимальны, когда он работает в диапазоне ослабления поля выше 50 Гц.
- При постоянной нагрузке на крутящий момент достигается больший диапазон скорости, когда двигатель работает хорошо в диапазоне ослабления поля с максимальной скоростью. Это означает, что наиболее эффективное использование крутящего момента и скорости привода переменной скорости .
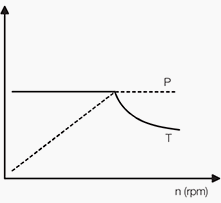
Типичные кривые крутящего момента и мощности при постоянном приводе мощности / крутящего момента
Это может означать экономию средств в виде меньшего двигателя и преобразователя .
Хотя многие производители утверждают, что их преобразователи могут производить выходные частоты до 400 Гц, эти высокие частоты практически не используются, за исключением особых (и необычных) исполнений. Конструкция стандартных каркасных двигателей и снижение пикового крутящего момента в зоне ослабления поля ограничивают их использование на частотах выше 100 Гц.
Максимальная скорость, с которой может запускаться стандартный двигатель с короткозамкнутым ротором , должна всегда проверяться у изготовителя, особенно для более крупных 2-полюсных (3000 об / мин) двигателей более 200 кВт. Шум вентилятора, создаваемый двигателем, также значительно увеличивается по мере увеличения скорости двигателя.
Сравнение крутящего момента, создаваемого 4-полюсным и 6-полюсным двигателями , показано на рисунке 1. Это иллюстрирует более высокую крутящую способность 6-полюсной машины.
Сравнение предельных кривых тепловой мощности для двух двигателей с короткозамкнутым ротором мощностью 90 кВт
a) 90 кВт 4-полюсный двигатель (1475 об / мин)
b) 90 кВт 6-полюсный двигатель (985 об / мин)
Принцип выбора 2:
Выбор двигателя большей мощности просто для того, чтобы быть «безопасным», обычно не рекомендуется, потому что это означает, что также должен быть выбран преобразователь с увеличенным частотным диапазоном. Преобразователи частоты, в частности, ШИМ-тип, рассчитаны на максимальное значение пикового тока, которое представляет собой сумму основных и гармонических токов в двигателе .
Чем больше двигатель, тем больше пиковые токи.
Чтобы избежать этого пикового тока, превышающего расчетный предел, конвертер никогда не должен использоваться с размером двигателя, большим, чем для указанного . Даже когда большой двигатель слегка загружен, его пики гармонических токов высоки.
Принцип выбора 3:
После выбора двигателя достаточно легко выбрать правильный размер преобразователя из каталога производителя . Обычно они рассчитаны на ток (не кВт) на основе определенного напряжения. Это следует использовать только в качестве руководства, поскольку преобразователи всегда должны выбираться на основе максимального непрерывного тока двигателя.
Хотя большинство каталогов основаны на стандартных номинальных значениях мощности двигателя IEC (кВт), двигатели разных производителей имеют несколько разные номинальные токи.
Преобразователи частоты Danfoss

Принцип выбора 4:
Хотя кажется очевидным, двигатель и преобразователь должны быть указаны для напряжения питания и частоты, к которой должен подключаться привод переменной скорости.
В большинстве стран, использующих стандарты IEC, стандартное напряжение питания составляет 380 вольт ± 6%, 50 Гц . В Австралии это 415 В ± 6%, 50 Гц . В некоторых приложениях, где мощность привода очень велик, часто экономично использовать более высокие напряжения для снижения стоимости кабелей. Другие обычно используемые напряжения 500 В и 660 В .
В последние годы преобразователи переменного тока изготавливаются для использования на напряжении 3,3 кВ и 6,6 кВ . Преобразователи частоты рассчитаны на то же выходное напряжение, что и на входе, поэтому оба двигателя и преобразователя должны быть указаны для одного и того же базового напряжения.
Хотя выходная частота преобразователя является переменной, входная частота (50 Гц или 60 Гц) должна быть четко определена, поскольку это может повлиять на конструкцию индуктивных компонентов .